task <<
Previous Next >> 動力學
robotdk
開啟RobotDK
主程式開啟後點選左上角"文件"/"打開"(開啟pick&place的範例)
CMD輸入 pip install robodk 讓RobotDK可以正常運行
進入Pick and Place 資料夾把Pick_and_place.py放進Scite裡面
修改Pick_and_place.py 把robodk_ip="......." 改成127.0.0.1
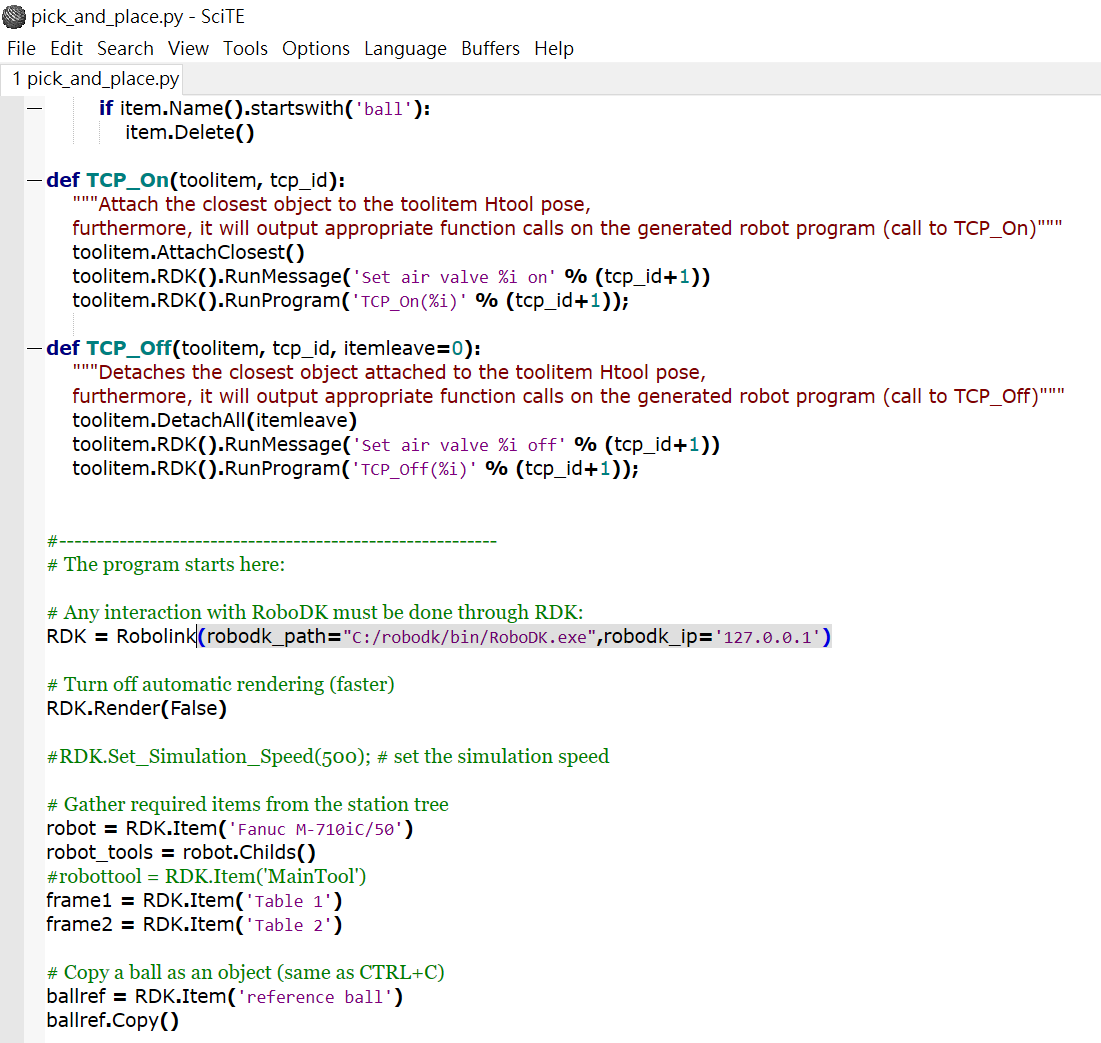
結束後按下go 即可執行
操作影片:
task <<
Previous Next >> 動力學